Manoeuvring in the presence of emergency vehicles is still a major issue for vehicle autonomy systems. Most studies that address this topic are based on rule-based methods, which cannot cover all possible scenarios that can take place in autonomous traffic. Multi-Agent Proximal Policy Optimisation (MAPPO) has recently emerged as a powerful method for autonomous systems because it allows for training in thousands of different situations. In this study, we present an approach based on MAPPO to guarantee the safe and efficient manoeuvring of autonomous vehicles in the presence of an emergency vehicle. We introduce a risk metric that summarises the potential risk of collision in a single index. The proposed method generates cooperative policies allowing the emergency vehicle to go at 15% higher average speed while maintaining high safety distances. Moreover, we conduct a comprehensive evaluation of our method in a wide range of scenarios, including assessing the trade-offs between traffic efficiency and safety, measuring the scalability of the approach with respect to the number of autonomous vehicles, analysing different distributions of mixed human and autonomous traffic, and examining the various levels of cooperation and competition among agents.
@article{pcTMA23,title={Safe and Efficient Manoeuvring for Emergency Vehicles in Autonomous Traffic using Multi-Agent Proximal Policy Optimisation},author={Parada, Leandro and Candela, Eduardo and Marques, Luís and Angeloudis, P},journal={Transportmetrica A: Transport Science},year={2023},publisher={Taylor & Francis}}
Driving Style Classification using Deep Temporal Clustering with Enhanced Explainability
Y. Feng,
Q. Ye,
F. Adan,
L. Marques
and P. Angeloudis.
In 26th IEEE International Conference on Intelligent Transportation Systems (ITSC)
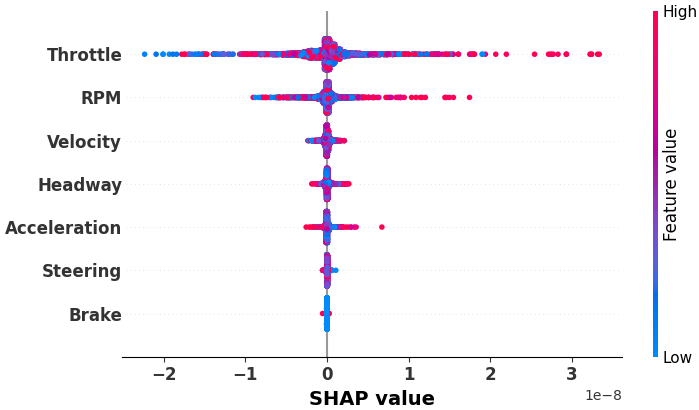
The driving styles of human drivers exhibit a diverse range of observed driving patterns and manoeuvres, influenced by their habitual choice of driving behaviours. Understanding these driving styles is essential for enhancing road safety and reducing emissions. In this paper, we propose a deep temporal clustering approach to classify driving styles, providing enhanced explainability. A comprehensive car-following dataset was collected, incorporating extensive feature parameters. Subsequently, we developed a deep temporal clustering-based classification method that considers the variations in driving style within a single trip. The performance evaluation employed K-Shape clustering, and the significance of various features was assessed using SHAP values, enhancing the interpretability of the model. Our findings contribute to the advancement of driving style classification methods, promoting a deeper understanding of driving behaviours for improved road safety measures.
@inproceedings{fengITSC23,title={Driving Style Classification using Deep Temporal Clustering with Enhanced Explainability},author={Feng, Yuxiang and Ye, Qiming and Adan, Fahmy and Marques, Luís and Angeloudis, Panagiotis},booktitle={26th IEEE International Conference on Intelligent Transportation Systems (ITSC)},year={2023}}
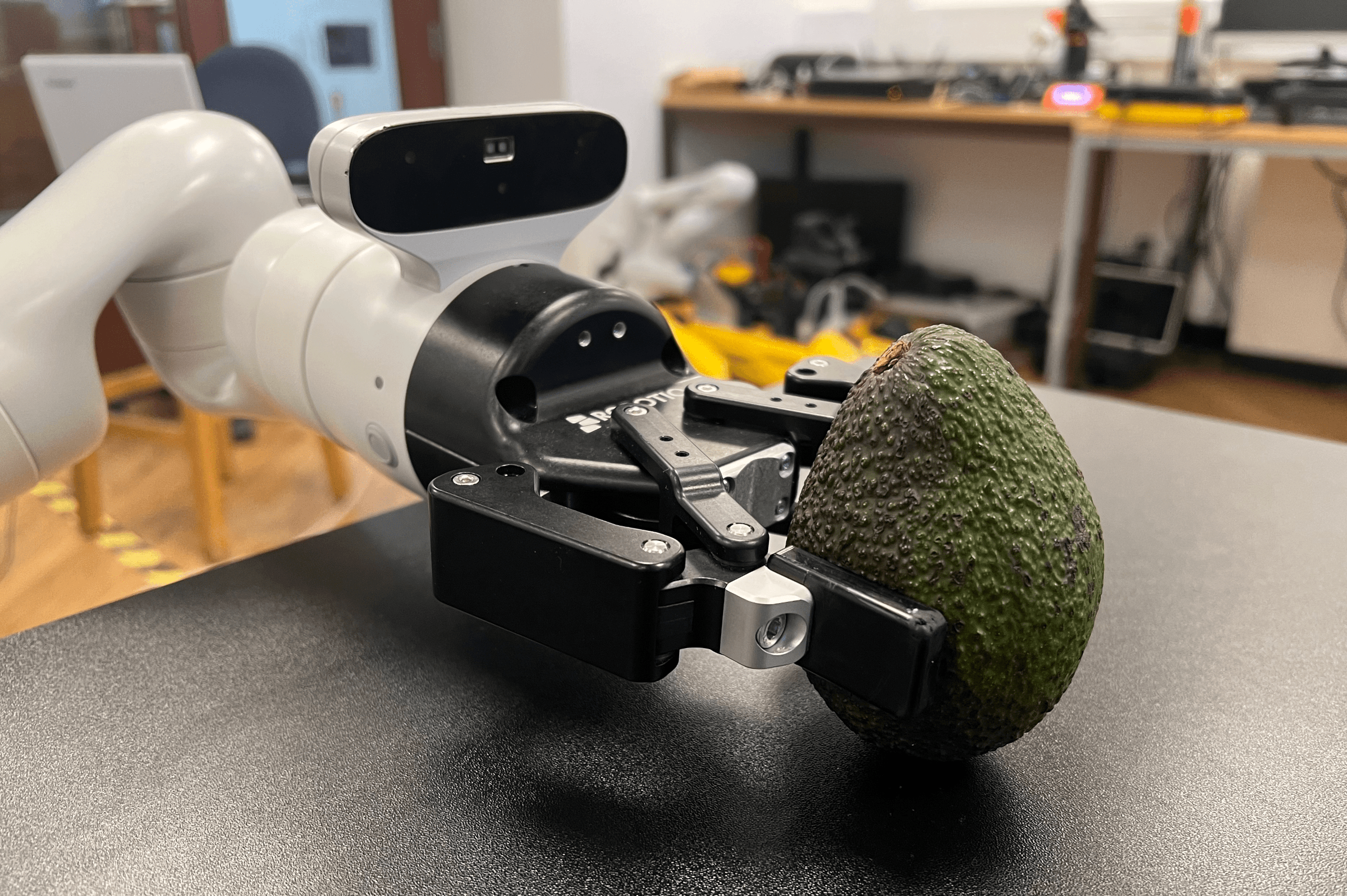
Healthcare professionals and caretakers are strained beyond measure and unable to cover the needs of an ever-growing elderly population. Although assistive robots have helped with other activities of daily living, feeding still remains mostly automation free. In this work, we advance the assistive feeding field on multiple fronts, making deployment-ready systems a closer reality. A full taxonomy of the feeding task is provided to spark research in under-explored areas. To aid with non- destructive food manipulation, a cheap and robust control method is developed for the compliant grasping of arbitrary foods. To increase the system’s potential utility, the first non-proprietary autonomous utensil swapping system is implemented through ingenious mechanical design. To enable the feeding of multi-material foods, a realistic way of modeling food cores and the first uncertainty-aware core estimator are developed. These efforts are validated numerically and on hardware.
Probabilistic Planning for Maritime Search and Rescue
L. Marques,
J. J. E. Macias
and P. Angeloudis.
In 6th International Conference on Dynamics of Disasters (DOD)
Maritime accidents cause thousands of disappearances every year, with migrant crossings being particularly dangerous and under-reported. Current coastal and NGO search and rescue services are unable to provide a timely response, so new technologies such as autonomous UAVs are needed. We present a thorough formalization of the maritime search and rescue problem considering its time-critical and probabilistic nature. Further, we introduce a method for determining the optimal search altitude for any aerial thermal-based detection system, so as to maximize overall mission success.
@inproceedings{marsarDOD23,title={Probabilistic Planning for Maritime Search and Rescue},author={Marques, Luís and J. E. Macias, Jose and Angeloudis, Panagiotis},booktitle={6th International Conference on Dynamics of Disasters (DOD)},year={2023}}
2022
Transferring Multi-Agent Reinforcement Learning Policies for Autonomous Driving using Sim-to-Real
E. Candela*,
L. Parada*,
L. Marques*,
T. Georgescu,
Y. Demiris
and P. Angeloudis.
In 35th IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Autonomous Driving requires high levels of coordination and collaboration between agents. Achieving effective coordination in multi-agent systems is a difficult task
that remains largely unresolved. Multi-Agent Reinforcement
Learning has arisen as a powerful method to accomplish
this task because it considers the interaction between agents
and also allows for decentralized training—which makes it
highly scalable. However, transferring policies from simulation
to the real world is a big challenge, even for single-agent
applications. Multi-agent systems add additional complexities to
the Sim-to-Real gap due to agent collaboration and environment
synchronization. In this paper, we propose a method to transfer
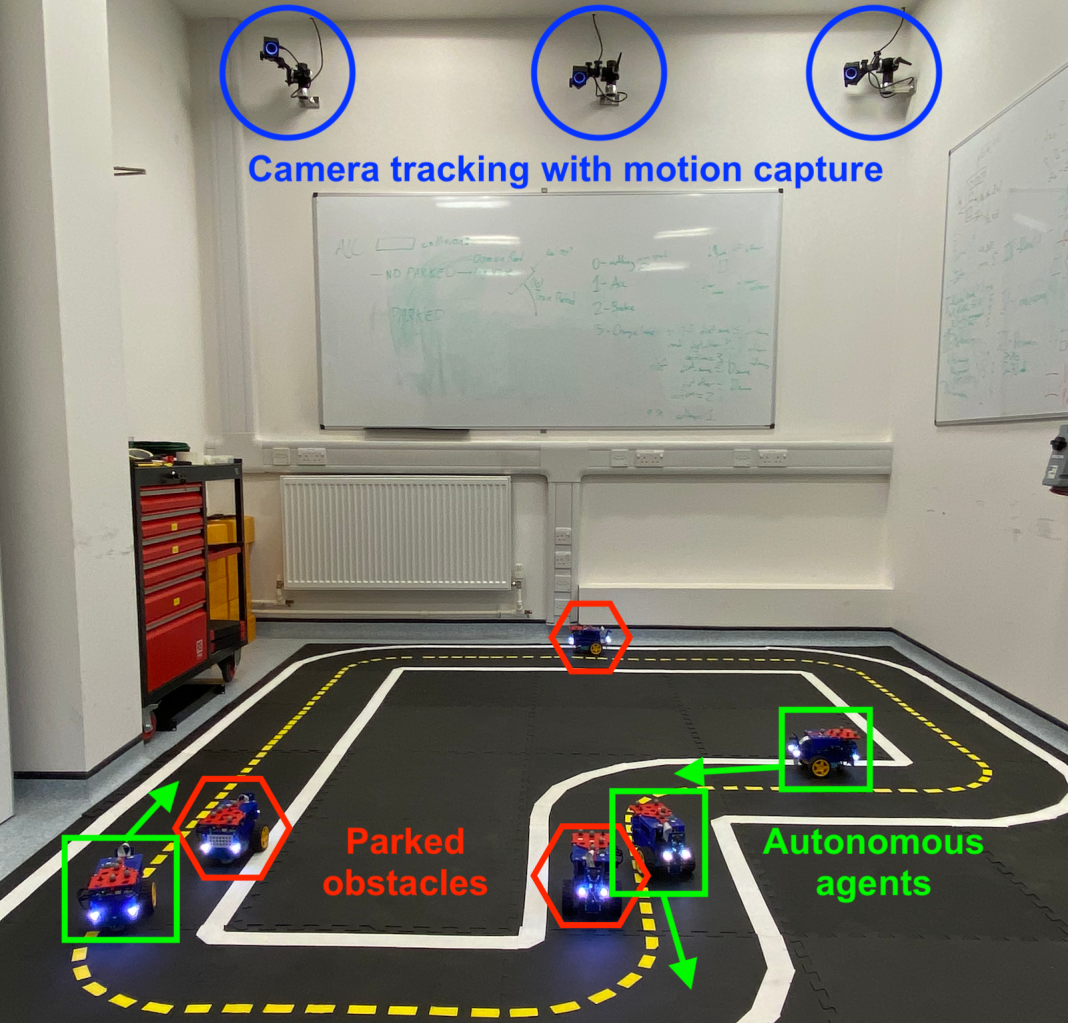
multi-agent autonomous driving policies to the real world. For
this, we create a multi-agent environment that imitates the
dynamics of the Duckietown multi-robot testbed, and train
multi-agent policies using the MAPPO algorithm with different
levels of domain randomization. We then transfer the trained
policies to the Duckietown testbed and show that when using
our method, domain randomization can reduce the reality gap
by 90%. Moreover, we show that different levels of parameter
randomization have a substantial impact on the Sim-to-Real gap.
Finally, our approach achieves significantly better results than
a rule-based benchmark.
@inproceedings{cpmIROS22,title={Transferring Multi-Agent Reinforcement Learning Policies for Autonomous Driving using Sim-to-Real},author={Candela, Eduardo and Parada, Leandro and Marques, Luís and Georgescu, T. and Demiris, Yiannis and Angeloudis, Panagiotis},booktitle={35th IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2022}}
2019
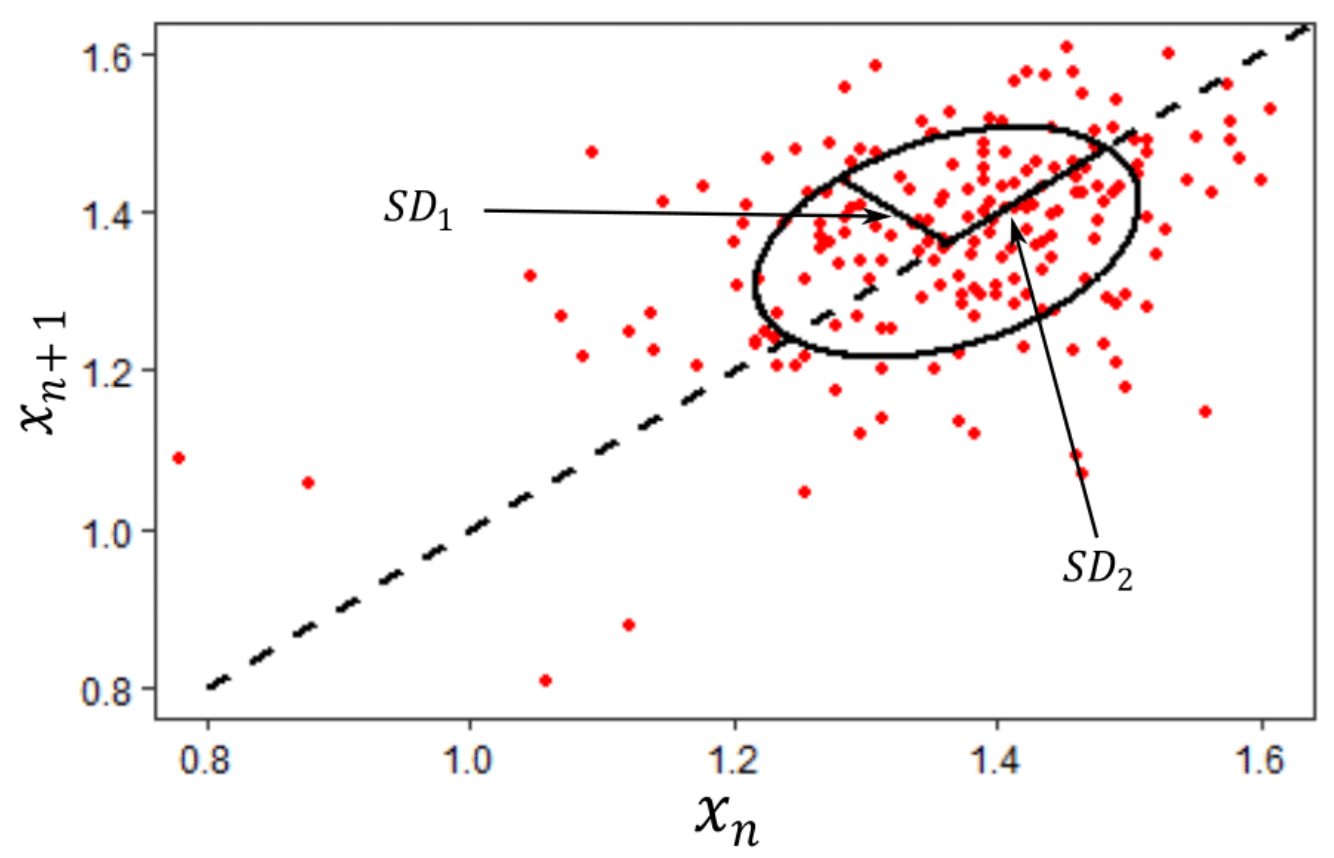
Feature Extraction using Poincaré Plots for Gait Classification
L. Marques,
F. Ferreira,
A. Correia,
E. Bicho
and W. Erlhagen.
In 25th Portuguese Conference on Pattern Recognition (RECPAD)
The aim of this study is to evaluate different features, extracted from a
Poincaré plot of gait signals, in their ability to classify the gait of patients
with neurodegenerative diseases: Parkinson’s disease (PD) and Hunting-
ton’s disease (HD). Five different features that describe gait variability
were extracted from the Poincaré plots of two gait signals: stride time
and percentage of stride time spent in swing phase. Among the set of ex-
tracted features, those that displayed significant differences between the
two groups and were not correlated with each other, were used as input
to the support vector machine classifier. It was found that all extracted
features (with exception of one feature in PD vs healthy group compari-
son) are significantly different between healthy and pathological subjects
and are suitable to discriminate them (with accuracies greater than 80%).
When comparing PD vs HD, just three features were significantly differ-
ent, however, a relatively good classification accuracy (around 72%) was
achieved using two of them. The results demonstrate that it is feasible
to apply variability measures extracted from Poincaré plots of gait data
signals in gait classification problems.
@inproceedings{marquesRECPAD19,title={Feature Extraction using Poincaré Plots for Gait Classification},author={Marques, Luís and Ferreira, Flora and Correia, Aldina and Bicho, Estela and Erlhagen, Wolfram},booktitle={25th Portuguese Conference on Pattern Recognition (RECPAD)},pages={57--58},year={2019}}